Hay dos versiones de la consola. Una con arduino Mega con el driver A4988 descrito en este articulo
y otra con el arduino nano33 IOT con el driver TCM2209 diseñado por MiguelDC y descrito en este enlace.
TRES FORMA DE REALIZAR FOTOGRAFÍA,
1 Hacer fotografía programando el nº de fotos a realzar
2 Hacer fotos de forma manual( disparo cada vez que pulsemos)
3 Mide el insecto y calcula las fotos necesarias, realizándose de forma automática
FOTOGRAFIAR DESDE SMARTPHONE
En esta versión, al controlador se accede desde el smartphone con una app que podemos descárganos desde esta pagina.
En el menú de la app disponemos de:
1º Medir de insectos: con esta función mide el insecto y calcula las fotos necesaria realizándolas automáticamente.
Tenemos que mover la cámara hasta enfocar uno de los extremo del insecto y desplazar la cámara como nos va indicando la aplicación hasta llegar al otro extremo o hasta donde queremos llegar fotografiando. A continuación pulsamos la A y nos indica cuantas fotos van a ser necesarias, pulsamos ok y comienza a realizar automáticamente las fotos.
2º Fotos automáticas: En esta función tenemos que escribir cuantas fotos queremos realizar y pulsar ok para que comience a realizarlas. El motor se desplazara en el sentido que le tengamos programado.
3º Fotos manual: Con esta opción realizara una foto cada vez que pulsemos ok, recordar que entre fotos hay un retardo para que la cámara se estabilice que el cual tenemos programado.
4º Final de carrera: En esto opción podemos programar donde están los limite de nuestro carril para que el motor se detenga cuando llegue a este punto. Esta opción se puede desactivar en la programación.
5º Tiempo fotos: Aquí podemos configurar el tiempo de retardo desde el desplazamiento de la cámara hasta la realización de la fotografía para que de tiempo a la cámara estabilizarse.
6º Sentido giro: En esta opción configuramos el sentido de desplazamiento cuando realizamos fotos en automático o manual.
7º pasos del motor: Esta opción es la mas importante, es el desplazamiento que va a tener el moto en cada fotografía. Es uno de los parámetros que va a determinar la calidad de nuestras fotos. Para calcularlo una versión del controlador dispone de calculadora para tal fin. En caso que no disponga de esta calculadora la tiene online en esta pagina.
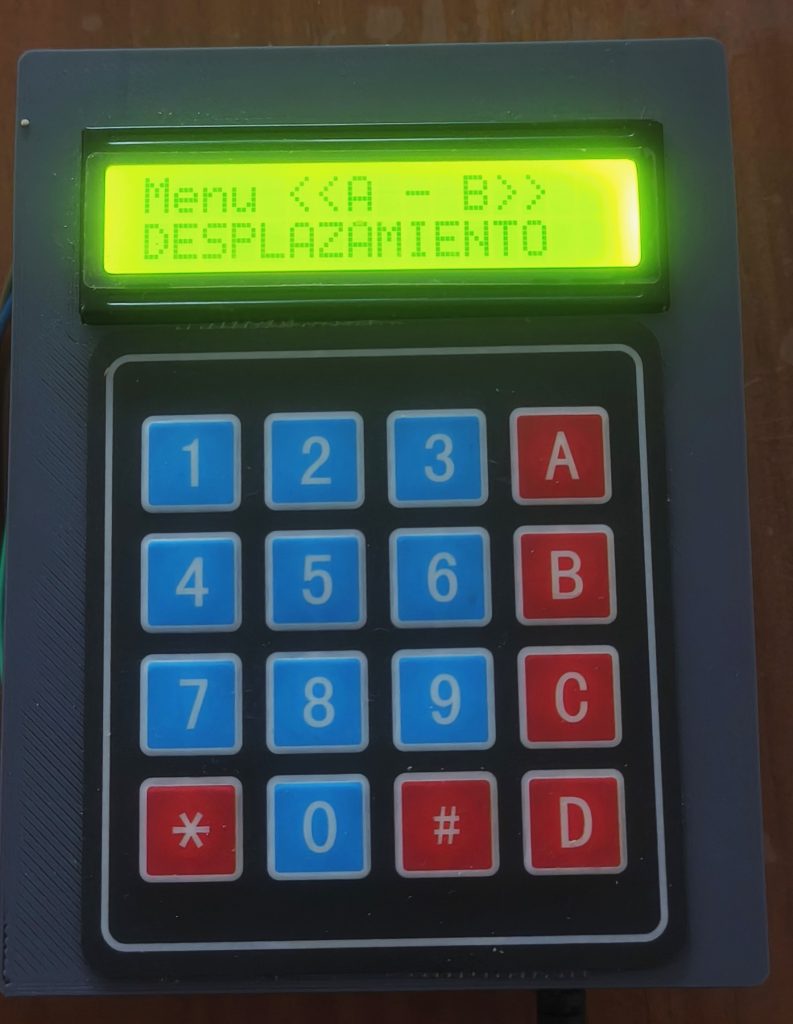
MENU PARA VERSIONES 4.74 O SUPERIOR
En esta versión, las opciones de la consola son las mismas descrita en el apartado anterior pero para acceder a los diferentes procesos tenemos que navegar por el menú con las tecla A o B en una dirección o en otra y con * se accede al procedimiento que tenemos seleccionado en el menú.
Ver el siguiente video para las instrucciones de funcionamiento:
COMO ACTUALIZAR EL CONTROLADOR A NUEVAS VERSIONES
Puedes ver el siguiente tutorial donde se explica paso a paso.
Es necesario desactivar el bluetooth en la configuración de Windows para actualizar el controlador. Solo nos debe aparecer el puerto del USB de la consola.
Si el controlador dispone de bluetooth, hay que desconectarlo físicamente, para que no interfiera con el puerto del USB
MODIFICACION DEL DRIVER PARA USAR LA NUEVA VERSION PRO
Solo es necesario para las consolas anteriores al 29-11-2024

Las mejoras de esta versión, es suavizar el avance del motor y desconectarlo cuando esta en reposo.
1º Soldar un cable en los pines M0 y M1 a los 5v. (línea verde) del driver como se ve en la imagen, cogiendo de referencia el potenciómetro.
Con esto conseguimos dividir los pasos del motor y reducir las vibraciones
2º Soldar un cable desde el pin13 del arduino al pin enable del driver (línea amarilla) como se ve en la figura.
Con esto desconectamos el motor cuando esta en reposo, eliminado ruidos y calentamientos.
3º Actualizar la consola a la versión 3 o superior. Para que las modificaciones sean efectivas hay que actualizar el controlador con la ultimas versiones.
ACTUALIZACION DEL FIRMWARE DEL CONTROLADOR
Para actualizar el controlador, solo tenemos que descargarnos la ultima actualización en DESCARGAS

1º Conectamos el controlador al puerto USB de nuestro ordenador a continuación abrimos el programa para actualizar, ponemos la velocidad que corresponda a nuestro arduino dependiendo si el bootloader si es antiguo o nuevo, elegimos el puerto al que no hemos conectado en el desplegable y pulsamos seleccionar, a continuación pulsamos actualizar.
Si todo a ido bien nos aparecerá dos mensajes verde, el primero nos indica que se esta actualizando y pasado un minuto aparecer el segundo indicando que todo fue bien.
También tiene la posibilidad de enviármelo, para que le haga yo las actualizaciones, pagando solo los gastos envío.
NOTA!! Los hilos del tornillo del carril tiene que ser de 1mm; Es decir, cada vuelta completa del tornillo el carril se desplaza 1mm. Si son de más hilos como los utilizados en impresoras 3d los desplazamientos serán mayores en cada vuelta, con lo cual los movimientos del carril serán mas rápidos.
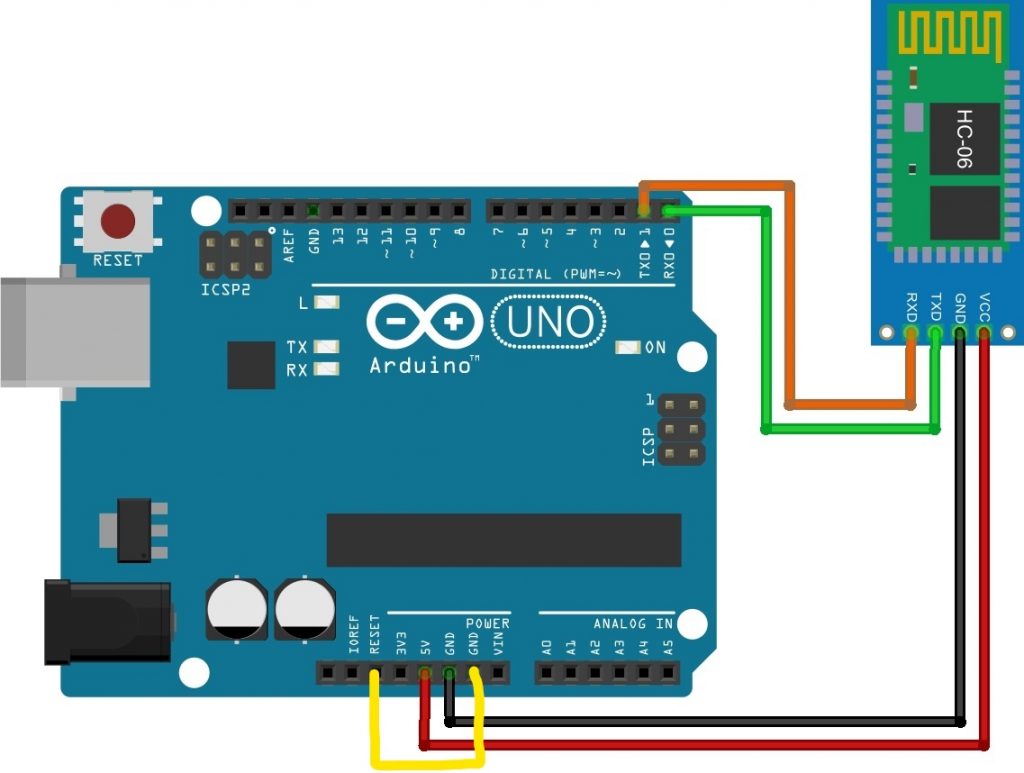
ESQUEMA PARA LA FABRICACIÓN DEL CONTROLADOR

El controlador va suministrado con el cable del motor y la fuente de alimentación de 12v.
El cable del motor es estándar para los motores nema17 con el conector que se ve en la siguiente imagen:

USAR EL CONTROLADOR EN CAMPO
El controlador puedes usarlo en campo, con una batería de litio de 12v.
En este enlace tienes diferente batería recargables de 12v con el conector incluido para el controlador .
El rail para usar en campo si pretendes usarlo en vertical es mejor uno con tracción de tornillo . Para subir un peso en vertical el tornillo nunca te va a patinar si el peso es excesivo . En cambio si solo le vas a dar uso en horizontal es mejor tracción con correas, tiene vibraciones al desplazamiento.
Batería 12v en Aliexpress, Bateria de 12v en Amazon
Puedes comprarlo en wallapop